
De afdeling mechatronica van de Saxion Hogeschool in Enschede werkt aan goed combineerbare robotonderdelen. De kennis die ze opdoen bij de opruimbot kan zo moeiteloos toegepast worden in de landbouwdrone.

In een lab op de tweede verdieping van het Edith Steingebouw in Enschede speelt een robot met wat Duplo. Het is een losse arm, aangestuurd door een desktopcomputer, en zijn opdracht is om een huisje te bouwen. Uiteindelijk moet het een ‘cobot’ worden, legt zijn baasje, onderzoeker Roy de Kinkelder uit: een coöperatieve robot, die samen kan werken met mensen. ‘Aan de ene kant kunnen robots niet alles, en aan de andere kant kun je er niet omheen dat ze steeds belangrijker worden in het productiewerk. Mens en robot moeten samenwerken. Dan is het dus wel de bedoeling dat wanneer de mens iets doet – een blokje van het huisje neerzetten, bijvoorbeeld – de robot dat vervolgens ziet, snapt en integreert in het werkplan.’
De Kinkelder laat trots een verzameling drones zien, bedoeld voor de landbouw en voor reddingswerk. Op een tafel staat de robot waar het allemaal mee begon. Of liever gezegd: de resten van die robot. Allerlei onderdelen zijn hergebruikt, onder meer in de Duplo-bot ietsje verderop. Het hele punt van de eerste robot was namelijk dat het een modulair systeem was: een combinatie van stukken die je aan elkaar kon koppelen en vervangen. Je computer is een voorbeeld van een modulair systeem: als je een groter beeldscherm wil, hoef je niet het complete ding te vervangen, maar alleen de monitor.
test 1 - Center images in content - premiumbericht
Lorem ipsum odor amet, consectetuer adipiscing elit. Curabitur netus elit tortor iaculis cras. Metus arcu dictum duis placera ...
De Duplo-robot loopt ondertussen vast. Hij wil een blauw blokje op de rode blokjes zetten, maar de pukkeltjes gaan niet in de gaatjes passen als je ze net recht op elkaar zet. Een programmeerfoutje, concluderen de studenten. Zo te zien een probleem dat wel vaker voorkomt: zonder mopperen gaan ze aan de slag om het op te lossen.
Knopen met technologie
‘Ons lectoraat is in 2011 opgericht, en toen zijn we begonnen door samen met een groep bedrijven en instellingen te werken aan blokken van kennis voor robots in de zorg’, vertelt De Kinkelder. ‘We hebben ingezet op lage kosten, en op die modulaire aanpak. Dat betekent dus dat we hier niet proberen om zelf een perfecte robot-arm te bouwen, maar dat we technologie die al bestaat aan elkaar knopen. Welke arm die je kunt kopen werkt het beste? We gaan niet opnieuw het wiel uitvinden en zelf een sensor bouwen. De vraag is juist: kunnen we het beste een webcam gebruiken, of een bewegingssensor van een spelcomputer? Als-ie voor 20 procent van de kosten 80 procent van de activiteiten kan doen, is dat prima: je stofzuigrobot thuis hoeft niet ook het gras te kunnen maaien. Er gaat geen robot komen die de verpleegkundige vervangt, dat zou echt te duur worden.’
De combinatie van die kennisblokken – over grijparmen, over navigatie, over hoe robots hun omgeving waarnemen, enzovoort – resulteerde in die eerste robot. ‘Een testcase’, verduidelijkt De Kinkelder: ‘bedoeld om van te leren.’ Het is een oranje driewielertje, ter grootte van een stofzuiger, met gaten waarin extra onderdelen geklikt kunnen worden. In volledige uitrusting kan hij objecten in een ruimte herkennen, oppakken en op de juiste plek leggen. Als je je bril laat vallen, legt hij hem op tafel, maar een koffiebekertje gaat in de prullenbak. ‘We hebben hem ook samen laten werken met een tafel-afruimrobot van de Technische Universiteit Eindhoven, zodat ze elk de taken uitvoerden waar de andere robot niet bij kon. Dat leert ons weer wat over communicatie tussen robots.’
Het slechte nieuws: die opruimbot komt voorlopig niet op de markt. De Kinkelder: ‘De kennis die we opdeden, over bijvoorbeeld navigatie en grijptechniek, zit nu in projecten van de bedrijven waar we mee samenwerken. Maar daar zit geen bedrijf bij dat specifiek zorgrobots maakt.’
Heeft hij dan geen spijt dat hij met een zorgbot is begonnen? De Kinkelder kijkt verbaasd. ‘Nee! Hoe die drones hier navigeren, dat hebben we geleerd dankzij de zorgrobot daar. De technologie is herbruikbaar, en juist door dit project hebben we alle andere dingen hier op poten kunnen zetten.’
‘Zorgen dat het werkt is al lastig genoeg’
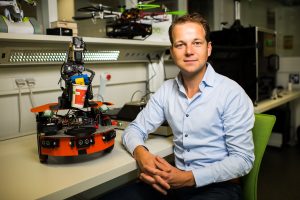
Bij modulaire robots kun je snel bouwen, en de opgedane kennis uit de ene robot kun je toepassen in een andere. Roy de Kinkelder van Saxion Hogeschool maakt ze.
Als het systeem echt modulair is, zou een verzorgingscentrum zelf een paar zorgrobots kunnen bouwen, toch?
‘Je kunt je voorstellen dat je naar een website gaat, en daar aanklikt wat je nodig hebt. Je moet een rijdend platform uitzoeken dat door de gang past, een grijper kiezen, de software die zorgt dat de robot doet wat je wilt, et cetera. Een beetje zoals je ook een elektrische fiets of een computer koopt, zeg maar. Dat ligt echter nog wel in de verre toekomst.’
Hoeveel zorg kunnen we straks kwijt aan robots?
‘Dat weet ik niet. Daarvoor zou ik eerst interviews met personeel moeten houden: welke taken vinden ze het lastigst en het zwaarst, en hoe kunnen robots daarbij helpen?’
Waarom hebt u dat niet gedaan bij het bouwen van die opruimbot?
‘Onze partners zijn bedrijven die geïnteresseerd zijn in de robotica-technologie, niet de zorginstellingen die ze gebruiken. Wij wilden een onderwijsprogramma voor onze studenten opzetten en kennis opdoen. Die kennis vloeit meteen weer door in je onderwijs, en zo worden zowel de studenten als de docenten beter van het onderzoek. Als je echte eindproducten produceert, moet je zeker uitgebreid onderzoek naar de gebruiker doen.’
Toch zat er een kennisblok ‘interface’ in het project.
‘Dat is iets waar wij mechatronici het minste van afweten. Hoe wordt een product ervaren en ingezet door de eindgebruiker? Dat is enorm belangrijk om te weten. In ons project is dat vooral opgepakt door de collega’s van Avans. Uit hun onderzoek in zorgcentra bleek dat de meeste mensen best positief waren over het gebruik van robots. Voor ons demonstratiemodel van de opruimrobot hebben we niet zoveel met die kennis kunnen doen. We hebben meer gefocust op de techniek: zorgen dat het werkt was al lastig genoeg.’
Deze rubriek is tot stand gekomen in samenwerking met Nationaal Regieorgaan Praktijkgericht Onderzoek SIA