Zolang niet alle voertuigen autonoom zijn, moeten zelfrijdende auto’s kunnen omgaan met menselijke bestuurders. Dat is geen eenvoudige taak. Onderzoekers van het Amerikaanse MIT en de TU Delft ontwikkelen daarom een systeem dat de persoonlijkheid van bestuurders inschat en zijn eigen rijstijl daaraan aanpast.
Als je af wilt slaan, schat je eerst in of je tegenligger sympathiek genoeg is om je de ruimte te geven door te remmen. Door dit soort inschattingen hoef je geen uren te wachten als je op een drukke weg af wilt slaan. Zelfrijdende auto’s zullen in zulke situaties waarschijnlijk wél uren blijven staan wachten. Ze begrijpen menselijk gedrag namelijk niet en rijden daarom extra voorzichtig. Dat kan leiden tot opstoppingen en irritaties.
test 1 - Center images in content - premiumbericht
Lorem ipsum odor amet, consectetuer adipiscing elit. Curabitur netus elit tortor iaculis cras. Metus arcu dictum duis placera ...
Persoonlijkheid voorspellen
Om mee te komen in het huidige verkeer is het handig als autonome voertuigen het rijgedrag van menselijke bestuurder kunnen voorspellen.
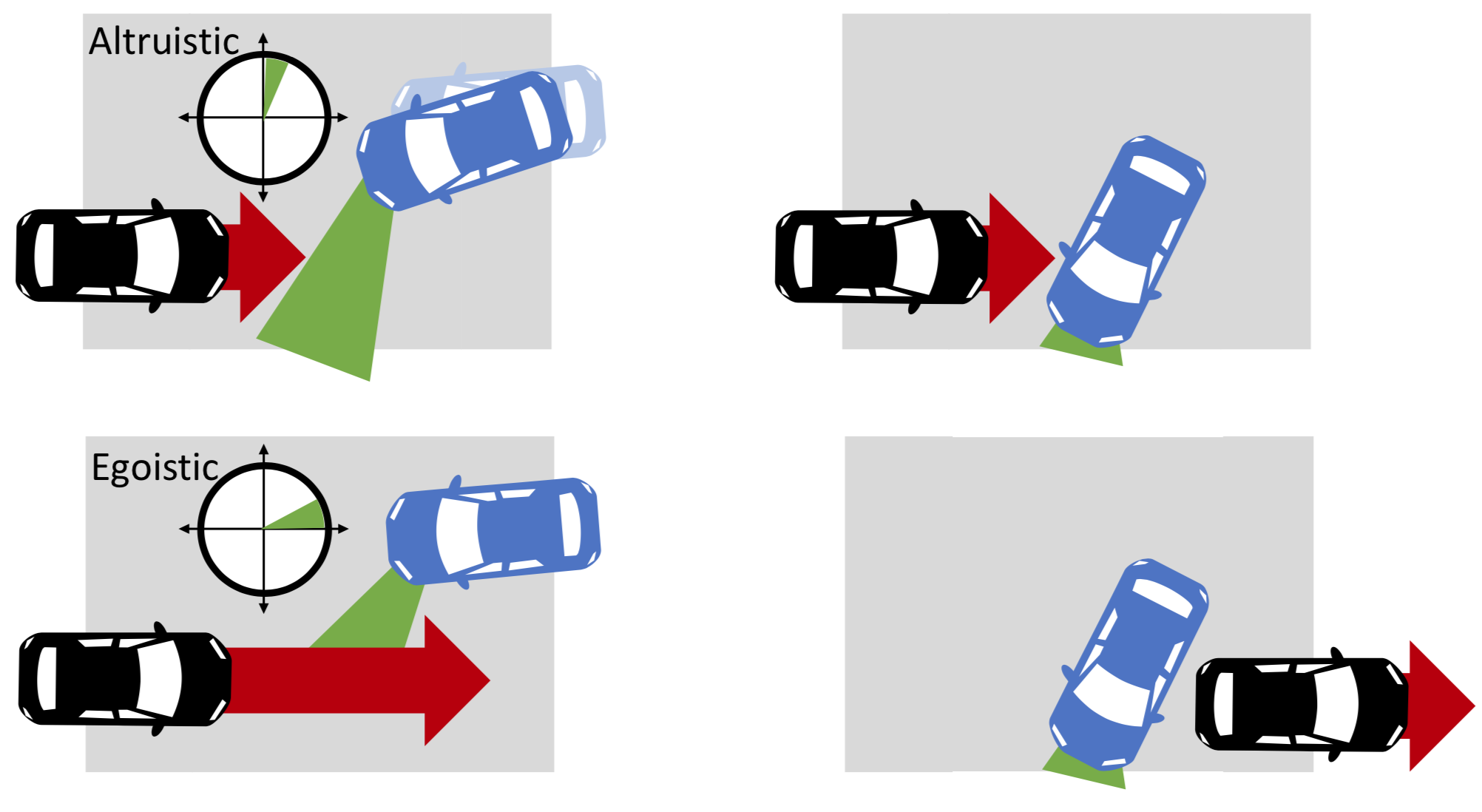
Dat proberen de onderzoekers voor elkaar te krijgen door zelfrijdende auto’s zo te programmeren dat ze de persoonlijkheid van andere bestuurders kunnen herkennen. Een altruïstische bestuurder zal je voor laten gaan als je af wilt slaan. Een egoïstische bestuurder kun je beter eerst laten passeren als je ongelukken wilt voorkomen.
Door andere bestuurders te classificeren als egoïstisch of altruïstisch moet het vervolgens beter mogelijk zijn om te voorspellen wat andere voertuigen gaan doen.
Social Value Orientation
Voor de indeling in deze twee categorieën gebruiken de onderzoekers instrumenten uit de sociale psychologie. Ze kwantificeerden het gedrag van bestuurders aan de hand van de zogeheten Social Value Orientation (SVO). Dit is een score waarmee op een schaal kan worden aangegeven in welke mate iemand egoïstisch of altruïstisch is.
Het systeem maakt realtime een schatting van de SVO van andere bestuurders. Dat doet het door de verschillende paden te voorspellen die een bestuurder zou afleggen als hij of zij egoïstisch of altruïstisch is. Vervolgens kijkt het systeem met sensoren of het pad dat een bestuurder aflegt beter overkomt met een pad dat een egoïst zou volgen of beter met het pad van een altruïst. Zo kan het systeem op basis van de rijbewegingen van andere weggebruikers hun rijgedrag categoriseren.
25 procent betere schattingen
De onderzoekers testten hun model in simulaties met data van menselijk rijgedrag op de US Highway 101. Daarnaast kreeg het systeem de taken ‘invoegen’ en ‘onbeveiligd links afslaan’ in een gesimuleerde omgeving.
Uit deze tests bleek dat een zelfrijdend systeem het gedrag van andere auto’s 25 procent beter kan inschatten als de SVO-score wordt meegenomen. De gesimuleerde autonome auto wachtte bijvoorbeeld met afslaan als een tegenligger egoïstisch leek. Bij een altruïstische tegenligger sloeg hij sneller af.
Het systeem is alleen nog in simulaties getest en is nog niet veilig genoeg om in het echte verkeer te gebruiken. Mogelijk is het wel in te zetten om menselijke bestuurders te waarschuwen voor meer of minder egoïstische weggenoten. Het systeem zou je bijvoorbeeld een waarschuwing kunnen geven in je achteruitkijkspiegel als een achterliggende auto een agressieve bestuurder heeft, zo stelt het persbericht voor. Dan zou je daar je eigen rijgedrag op kunnen aanpassen.